การควบคุมหุ่นยนต์เคลื่อนที่ตามเส้น
การทดลองการเขียนโปรแกรมบังคับหุ่นยนต์ ให้เคลื่อนที่ตามเส้น เป็นการตรวจวัดค่าแสง แล้วเขียนโปรแกรมบังคับหุ่นยนต์ให้เดินตามค่าแสงที่ได้ เราจะทดลองใช้อุปกรณ์ Light Sensor ในตรวจวัดค่าแสงบนพื้น ให้นักเรียนประกอบหุ่นยนต์เหมือนกับในกิจกรรม ตรวจวัดค่าแสง
ตัวอย่าง การเขียนโปรแกรมเคลื่อนที่ตามเส้น
การวัดค่าแสงสะท้อน จากพื้นสีขาวและเส้นสีดำ
- พื้นสีขาวจะให้แสงสะท้อนมากกว่าสีดำ ค่าแสงสะท้อนขึ้นอยู่กับหุ่นยนต์ และ sensor ของแต่ละตัว ก่อนการเขียนโปรแกรม ควรมีการวัดค่าแสงก่อนให้นักเรียนดูวิธีการที่ View
- ระยะห่างระหว่าง light sensor กับพื้น ระยะห่างมากจะให้ค่าการสะท้อนแสงไม่ค่อยดี ระยะห่างน้อยจะให้ค่าสะท้อนแสงดีกว่า และแม่นยำกว่า ระยะห่างที่ใช้งานได้ดี ประมาณ 1 - 6 มิลมิลิเมตร
Error: Flash player is not installed.
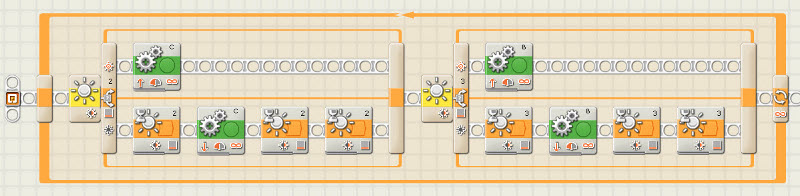
จากโปรแกรมข้างบน ลำดับขั้นตอนเป็นดังนี้
- เพื่อให้หุ่นยนต์เคลื่อนที่ตามเส้นไปเรื่อยๆ จนกว่าจะกดหยุด ใช้ Loop Block
- สร้างเงื่อนไขสำหรับค่าแสงโดยใช้ Switch Block โดยนำค่าของ Light Sensor มาเป็นตัววัด
- หากค่าแสงมากกว่าที่กำหนด (ไม่พบเส้น) ให้หุ่นยนต์เดินโค้งไปทางขวา เพื่อเคลื่อนที่เข้าหาเส้นที่อยู่ด้านขวา
- หากค่าแสงน้อยกว่าที่กำหนด (พบเส้น) ให้หุ่นยนต์เดินโค้งไปทางซ้าย เพื่อเคลื่อนที่ออกจากเส้น
หุ่นยนต์เคลื่อนที่ตามเส้น
แบบฝึกหัด
ให้นักเรียนเขียนโปรแกรมเดินตามเส้น โดยใช้ Light Sensor สองอัน มีหลักการดังต่อไปนี้
- หากเซ็นเซอร์ซ้าย ตรวจพบเส้น ให้หุ่นยนต์เดินเลี้ยวไปทางซ้าย
- หากเซ็นเซอร์ขวา ตรวจพบเส้น ให้หุ่นยนต์เดินเลี้ยวไปทางขวา
- หากเซ็นเซอร์ทั้งสองตัวไม่ตรวจพบเส้น ให้เดินไปข้างหน้า
ตัวอย่าง
Error: Flash player is not installed.