การควบคุมหุ่นยนต์ให้ตรวจวัดค่าแสง
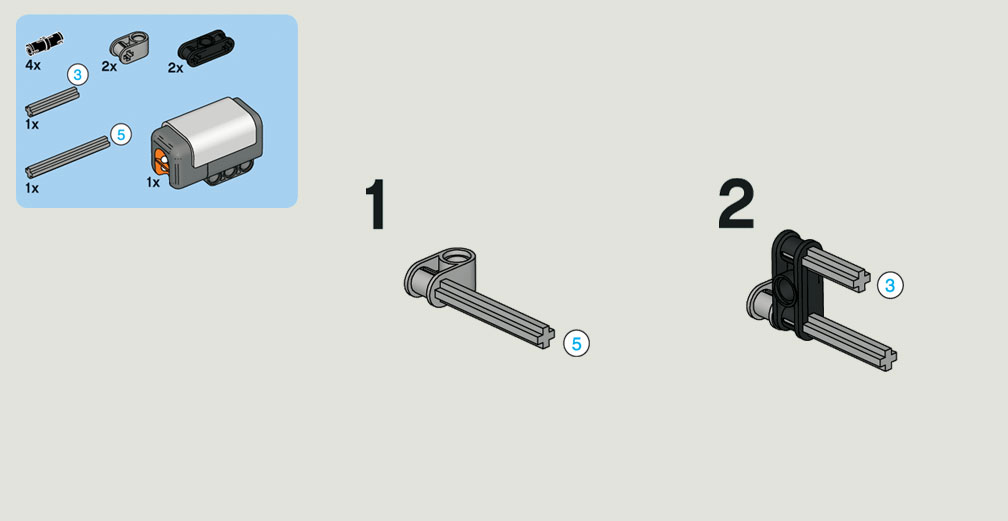
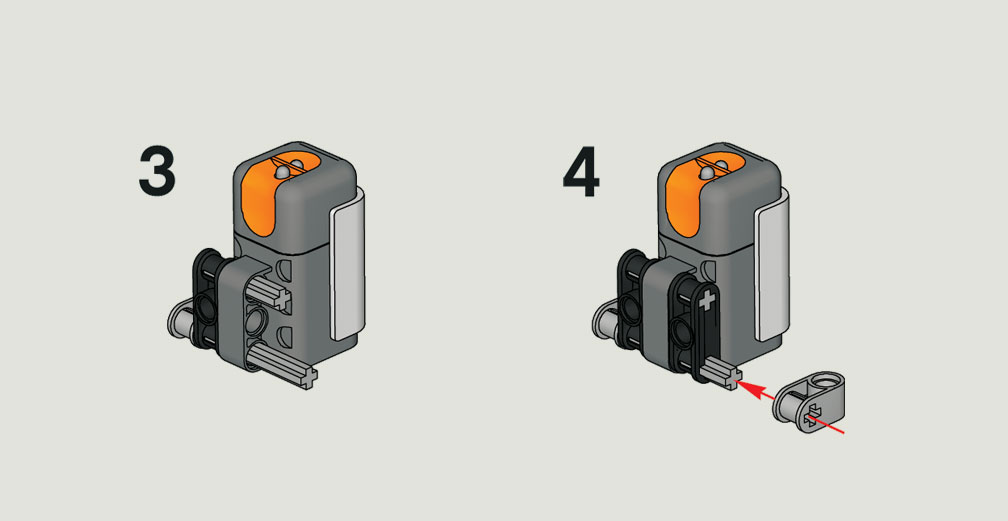
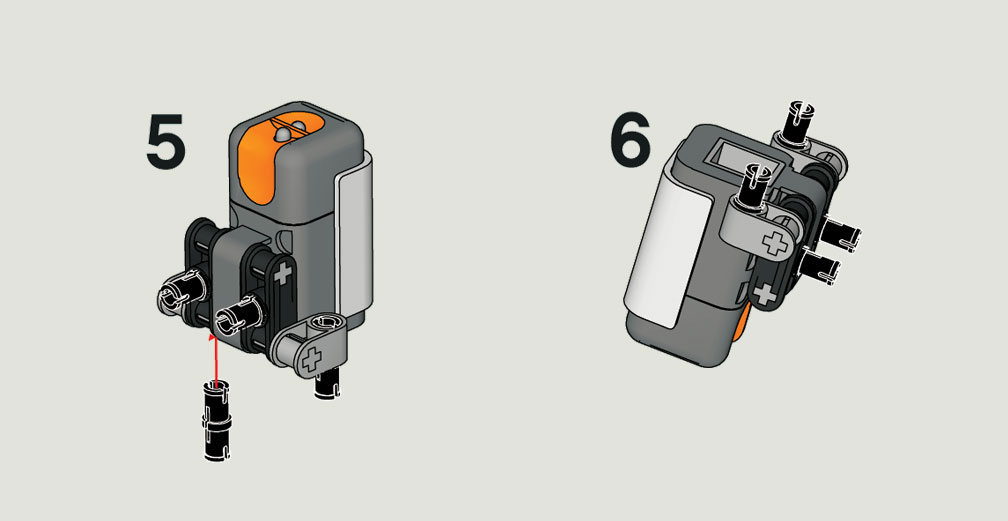
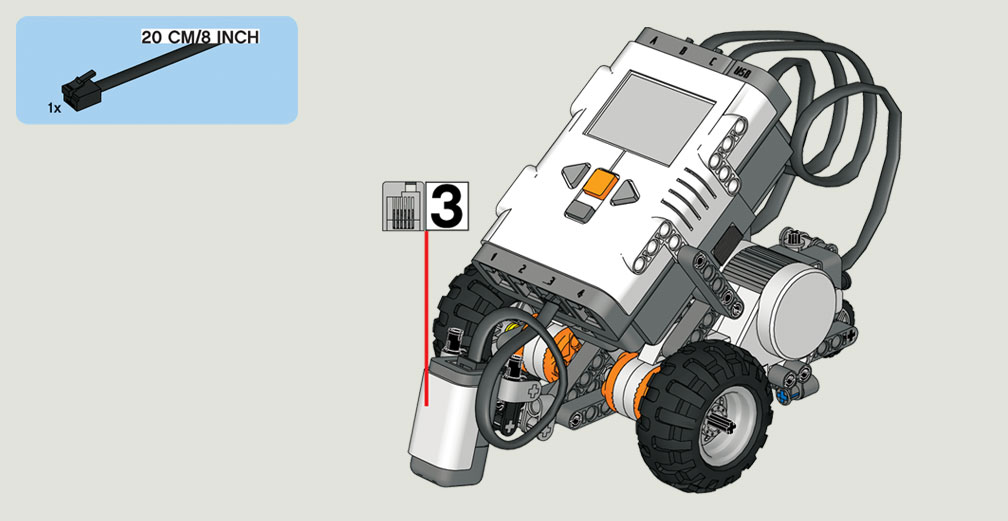
การทดลองการเขียนโปรแกรมบังคับหุ่นยนต์ ให้ตรวจวัดค่าแสง เราจะทดลองใช้อุปกรณ์ ที่เป็น sensor แบบ Light sensor ตรวจวัดค่าแสง ก่อนอื่นนักเรียนจะต้องประกอบอุปกรณ์เพิ่มเติมเข้ากับชุดหุ่นยนต์เคลื่อนที่แบบมาตรฐาน ดังสไลด์ข้างล่าง
ตรวจวัดแสง
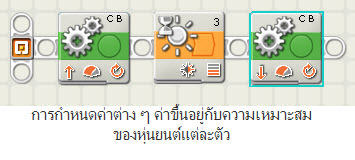
ตัวอย่าง การเขียนโปรแกรมวัดค่าแสง
การวัดค่าแสงสะท้อน จากพื้นสีขาวและเส้นสีดำ
- พื้นสีขาวจะให้แสงสะท้อนมากกว่าสีดำ ค่าแสงสะท้อนขึ้นอยู่กับหุ่นยนต์ และ sensor ของแต่ละตัว ก่อนการเขียนโปรแกรม ควรมีการวัดค่าแสงก่อนให้นักเรียนดูวิธีการที่ View
- ระยะห่างระหว่าง light sensor กับพื้น ระยะห่างมากจะให้ค่าการสะท้อนแสงไม่ค่อยดี ระยะห่างน้อยจะให้ค่าสะท้อนแสงดีกว่า และแม่นยำกว่า ระยะห่างที่ใช้งานได้ดี ประมาณ 1 - 6 มิลมิลิเมตร
Error: Flash player is not installed.
- เปิดหุ่นยนต์ ให้หุ่นยนต์เดินไปข้างหน้า
- เมื่อ light sensor รับค่าแสงสะท้อนจากเส้นสีดำมีค่าน้อยกว่า 40(Wait for light) ให้หุ่นยนต์หยุดการทำงาน
ตรวจวัดแสง
แบบฝึกหัด
ให้นักเรียนเขียนโปรแกรมดังต่อไปนี้:
- เปิดหุ่นยนต์ ให้หุ่นยนต์เดินไปข้างหน้า บนพื้นสีดำ
- เมื่อหุ่นยนต์เจอเส้นสีขาวให้หุ่นยนต์ถอยกลับมา 2 วินาทีแล้วหยุดการทำงาน