การควบคุมหุ่นยนต์ด้วยการตรวจสอบการชน
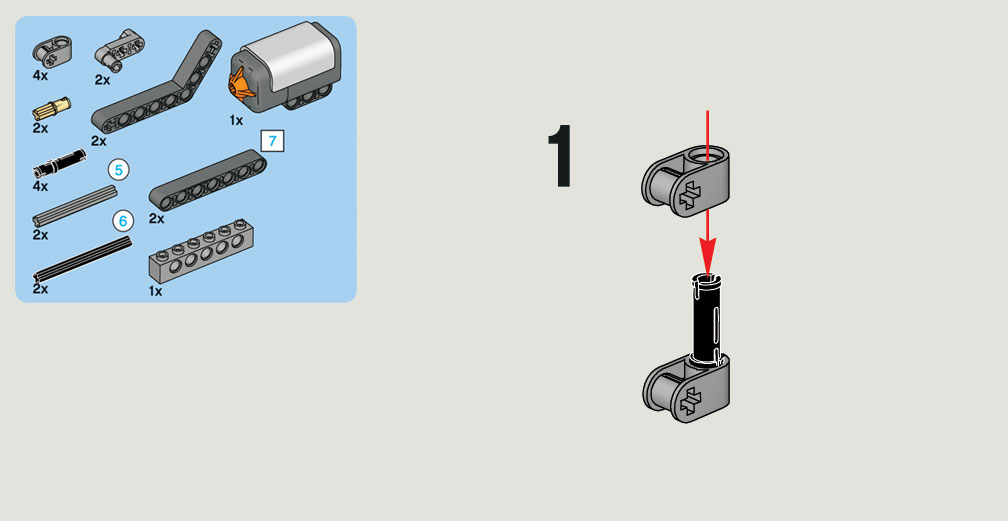
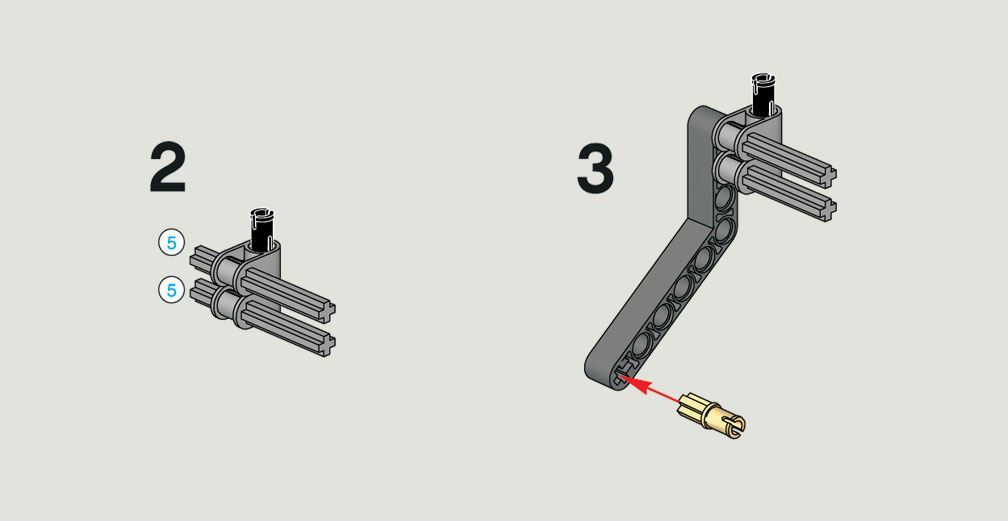
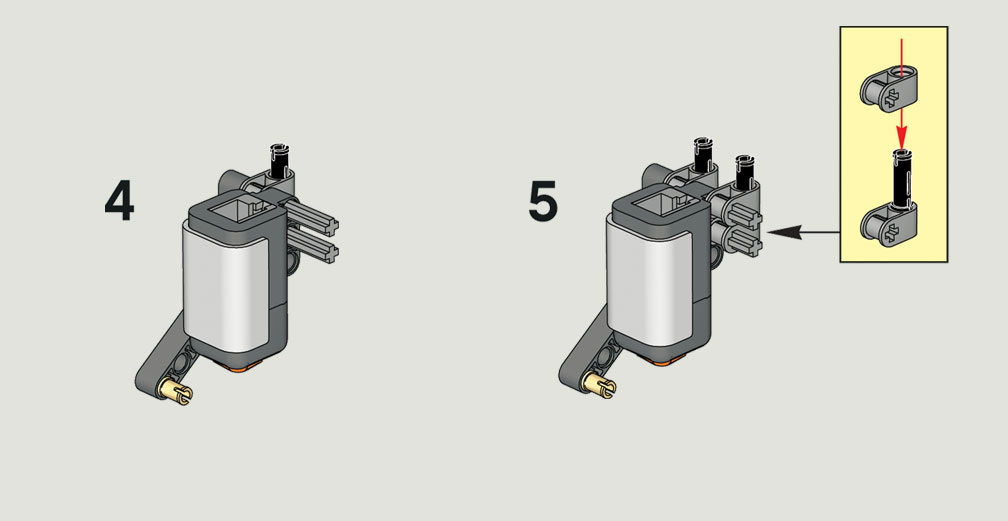
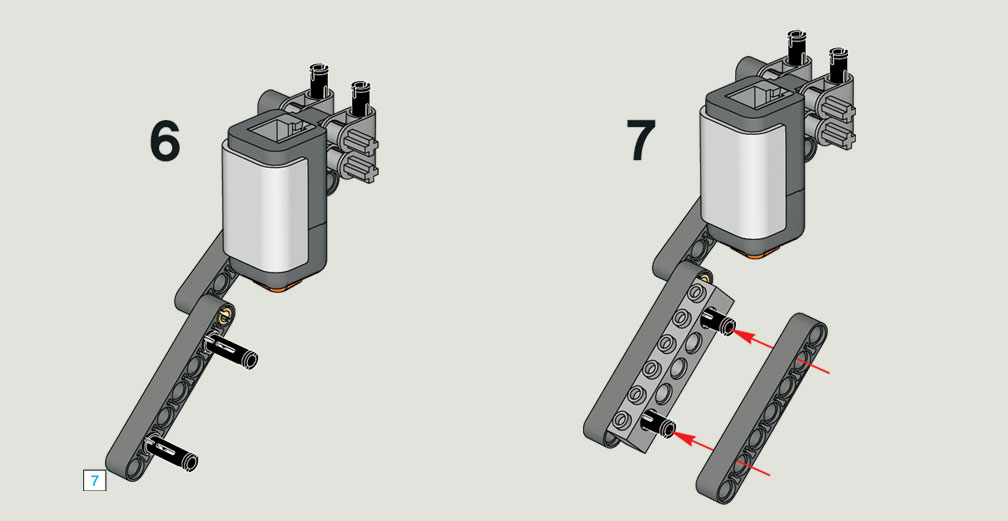
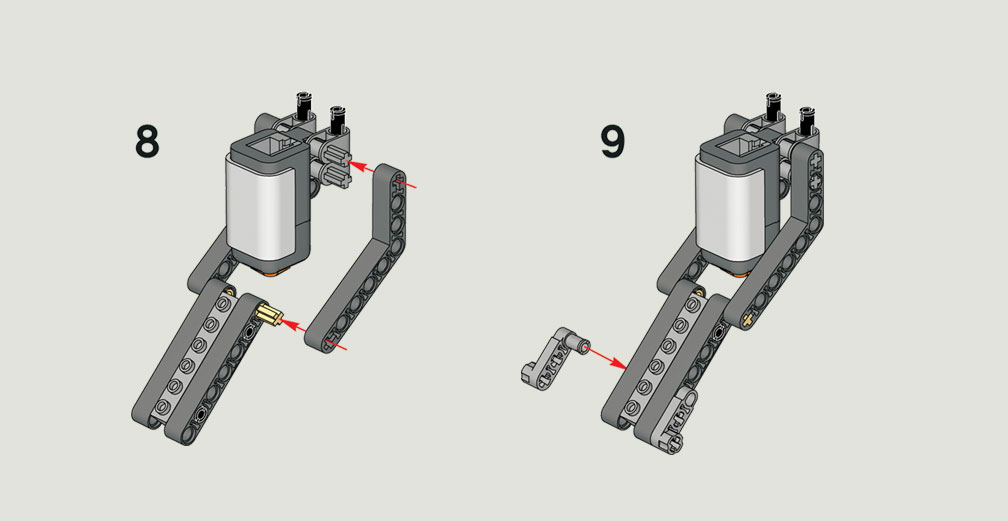
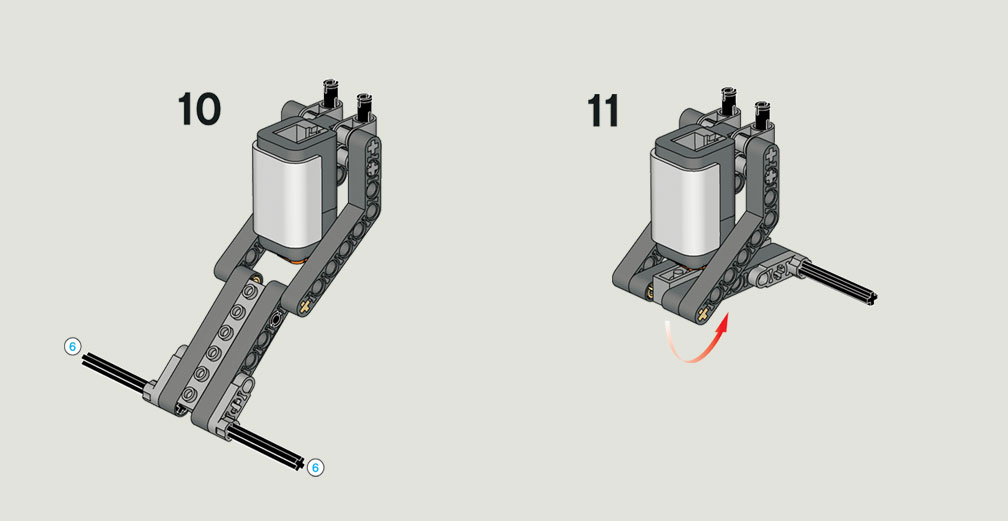
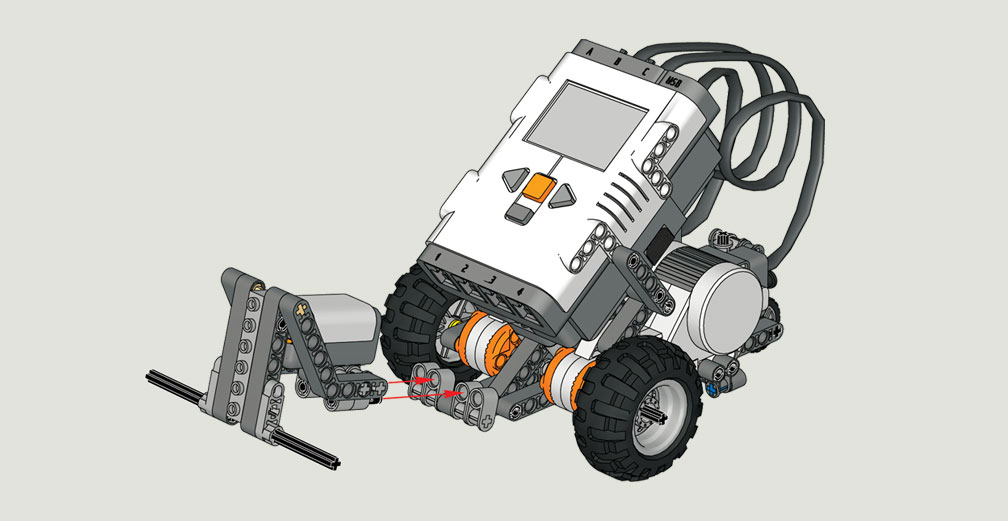
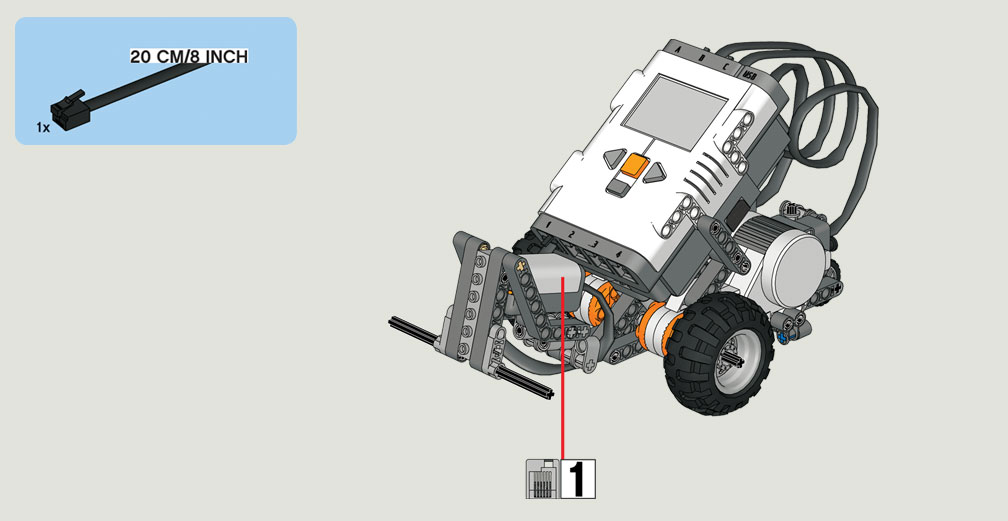
หลังจากที่เราได้ทดลอง การควบคุมหุ่นยนต์ให้เคลื่อนที่แบบอัตโนมัติ แล้ว ต่อไปเราจะทำการทดลองโดยเขียนโปรแกรม ควบคุมหุ่นยนต์ให้หลบสิ่งกีดขวางด้วยการตรวจสอบการชน โดยใช้ sensor แบบ Touch sensor ก่อนอื่นนักเรียนจะต้องประกอบอุปกรณ์เพิ่มเติมเข้ากับชุดหุ่นยนต์เคลื่อนที่แบบมาตรฐาน ดังสไลด์ข้างล่าง
ตรวจสอบการชน
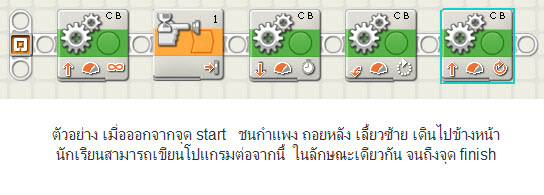
ตัวอย่าง การเขียนโปรแกรมเมื่อเกิดการชนสิ่งกีดขวาง
ตัวอย่างที่ 1
Error: Flash player is not installed.
- หุ่นยนต์เดินไปข้างหน้า แบบไม่จำกัดเวลา
- เมื่อเกิดการชน (Wait for touch) ให้หุ่นยนต์เดินถอยหลัง 2 วินาทีแล้วหยุด
ตรวจสอบการชน
ตัวอย่างที่ 2
Error: Flash player is not installed.
- หุ่นยนต์เดินไปข้างหน้า แบบไม่จำกัดเวลา
- เมื่อเกิดการชน (Wait for touch) ให้หุ่นยนต์เดินถอยหลัง 1 วินาที
- เลี้ยวขวา แล้วเดินตรงไปข้างหน้าให้พ้นกำแพง
- เลี้ยวซ้าย
- เดินตรงไปข้างหน้า 2 วินาที แล้วหยุด
ตรวจสอบการชน
แบบฝึกหัด
ให้ลองเขียนโปรแกรมหุ่นยนต์ให้เดินตามเขาวงกตดังรูป
- หุ่นยนต์เดินหน้าจากจุด Start
- เมื่อ Touch Sensor ชนกับกำแพง ให้เลี้ยวตามทางที่ถูกต้อง
- เมื่อถึงจุด Finish ให้หุ่นยนต์หยุด