การควบคุมหุ่นยนต์ด้วยการตรวจสอบการวัดระยะห่างหรือระยะทาง
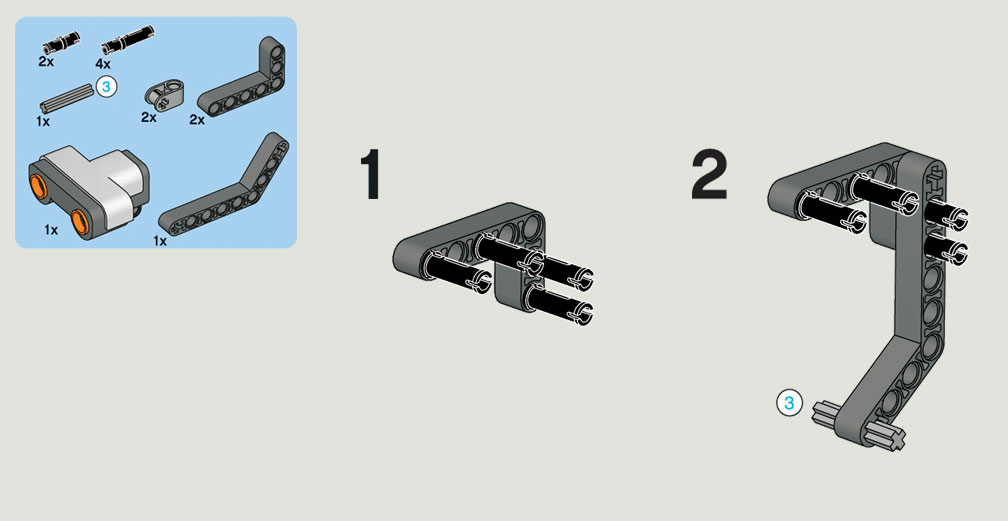
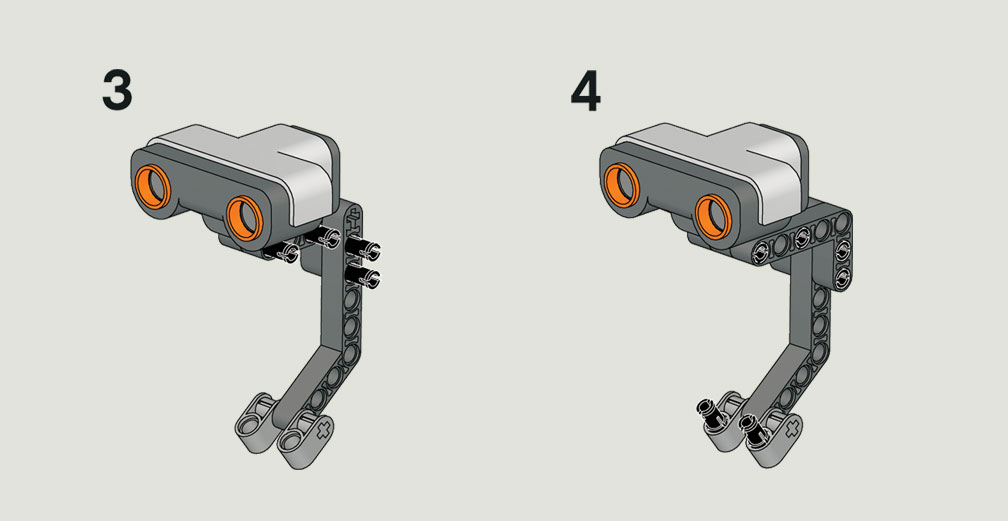
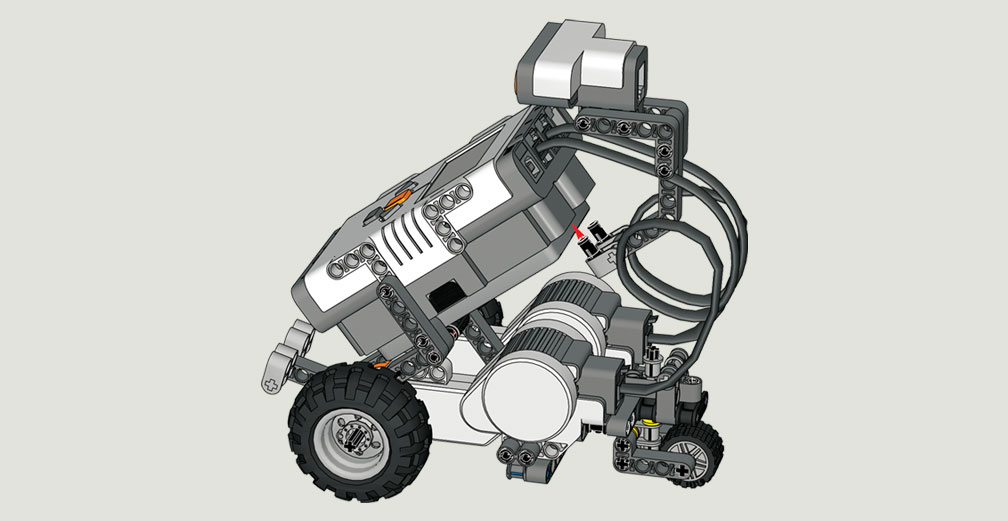
หลังจากนักเรียนทดลองการเขียนโปรแกรมบังคับหุ่นยนต์ ตรวจสอบการชนแล้ว กิจกรรมต่ิอไป เราจะทดลองใช้อุปกรณ์ ที่เป็น sensor แบบ Ultrasonic ตรวจสอบสิ่งกีดขวาง ซึ่งจะเป็นการตรวจวัดว่ามีสิ่งกีดขวางอยู่ข้างหน้าเป็นระยะทางเท่าใด ก่อนอื่นนักเรียนจะต้องประกอบอุปกรณ์เพิ่มเติมเข้ากับชุดหุ่นยนต์เคลื่อนที่แบบมาตรฐาน ดังสไลด์ข้างล่าง

ตรวจวัดระยะห่าง
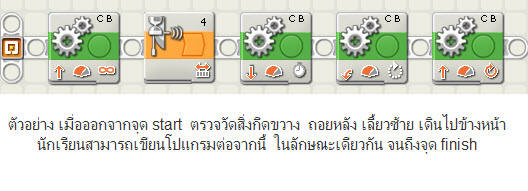
ตัวอย่าง การเขียนโปรแกรมวัดระยะทางตรวจหาสิ่งกีดขวาง
ตัวอย่างที่ 1
Error: Flash player is not installed.
- หุ่นยนต์เดินไปข้างหน้า แบบไม่จำกัดเวลา
- เมื่อหุ่นยนต์ตรวจวัดเจอสิ่งกีดขวาง ระยะห่างจากตัวหุ่นยนต์ น้อยกว่า 30 ซ.ม. (Wait for distance)
- หุ่นยนต์เดินถอยหลัง 2 วินาทีแล้วหยุด
ตรวจวัดระยะห่าง
ตัวอย่างที่ 2
Error: Flash player is not installed.
- หุ่นยนต์เดินไปข้างหน้า แบบไม่จำกัดเวลา
- เมื่อหุ่นยนต์ตรวจวัดเจอสิ่งกีดขวาง ระยะห่างจากตัวหุ่นยนต์ น้อยกว่า 10 ซ.ม. (Wait for distance)
- เลี้ยวขวา แล้วเดินตรงไปข้างหน้าให้พ้นกำแพง
- เลี้ยวซ้าย
- เดินตรงไปข้างหน้า 2 วินาที แล้วหยุด
ตรวจวัดระยะห่าง
แบบฝึกหัด
ให้ลองเขียนโปรแกรมหุ่นยนต์ให้เดินตามเขาวงกตดังรูป
- หุ่นยนต์เดินหน้าจากจุด Start
- เมื่อ Ultrasonic Sensor ตรวจพบกำแพง ให้เลี้ยวตามทางที่ถูกต้อง
- เมื่อถึงจุด Finish ให้หุ่นยนต์หยุด